Project Description
During my internship at the Center for Automation Systems Engineering (CASE), KLE Technological University, I was a part of the development of a robust framework for multi-robot path planning and navigation tailored for challenging agricultural environments. Leveraging RTK-GPS-based localization and waypoint navigation, the system ensured precise and safe traversal across dynamic outdoor terrains.
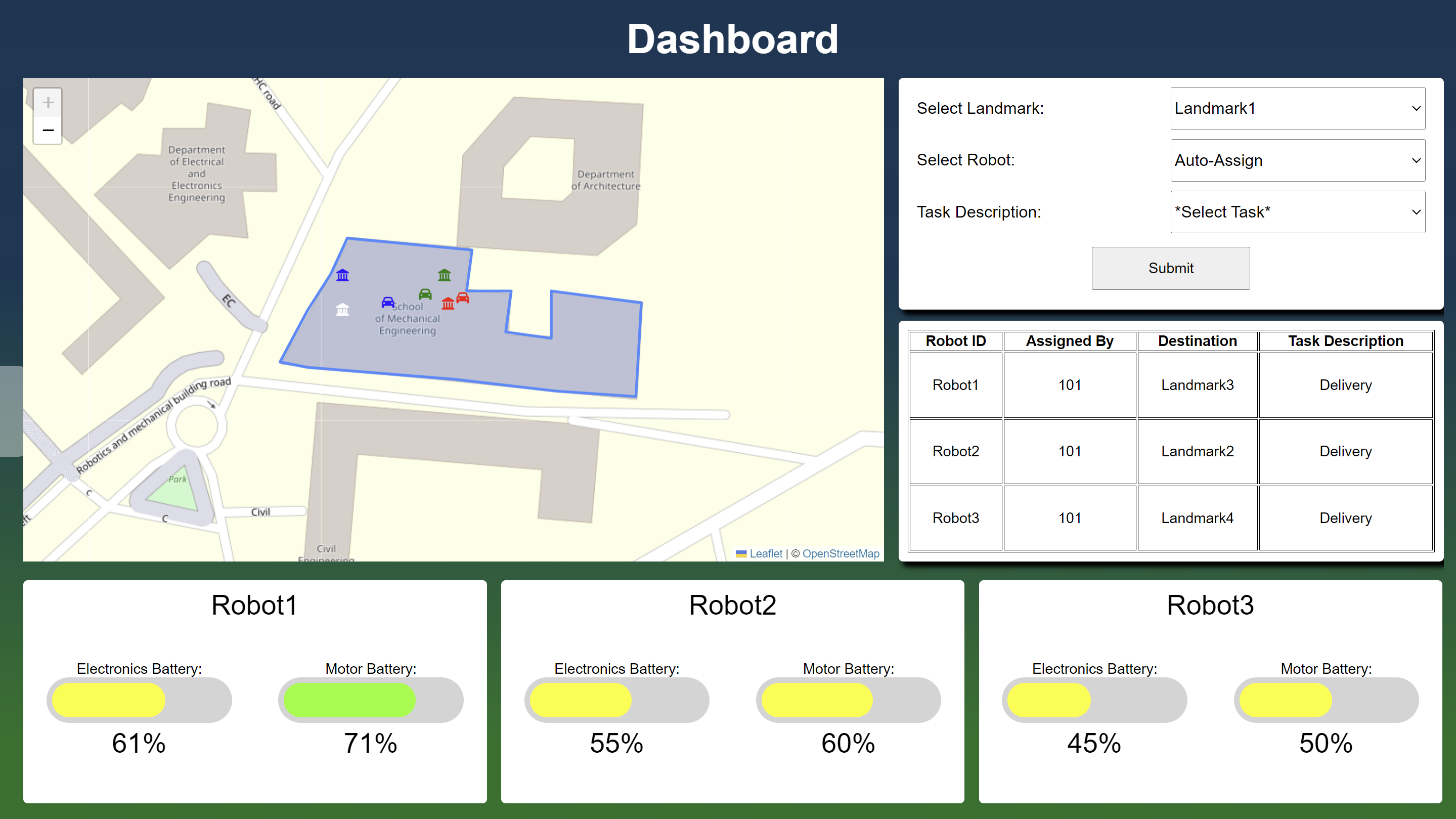
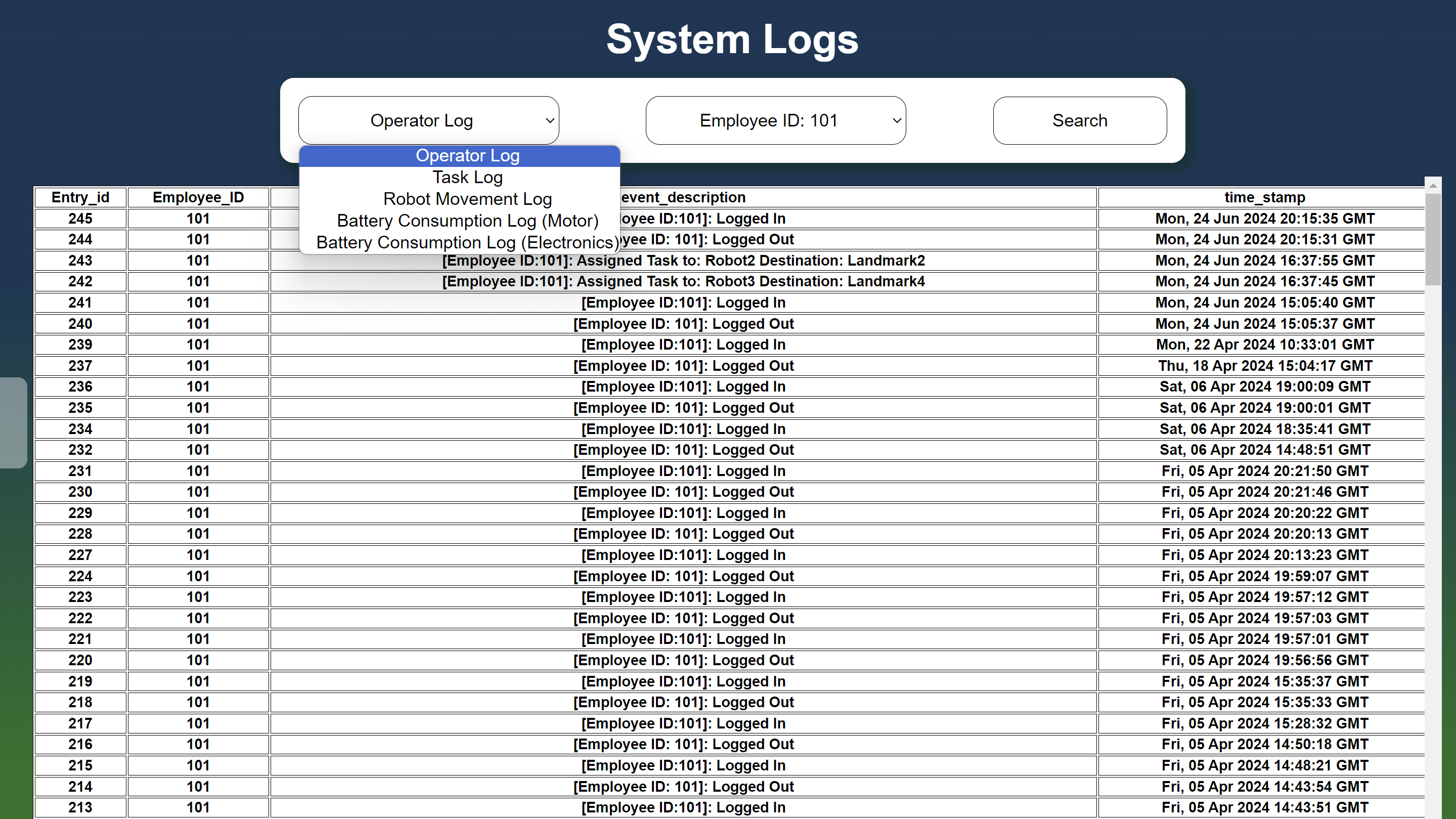
At the core of this project lied the Fleet Manager — a Flask-based web application designed for real-time robot monitoring, task allocation, and system diagnostics. The app bridged the gap between robotic operations and user control, streamlining task management and enhancing field deployment efficiency..
Technologies Used
HTML, CSS, JavaScript, Folium(leaflet.js), Flask, Python, MySQL