Project Description
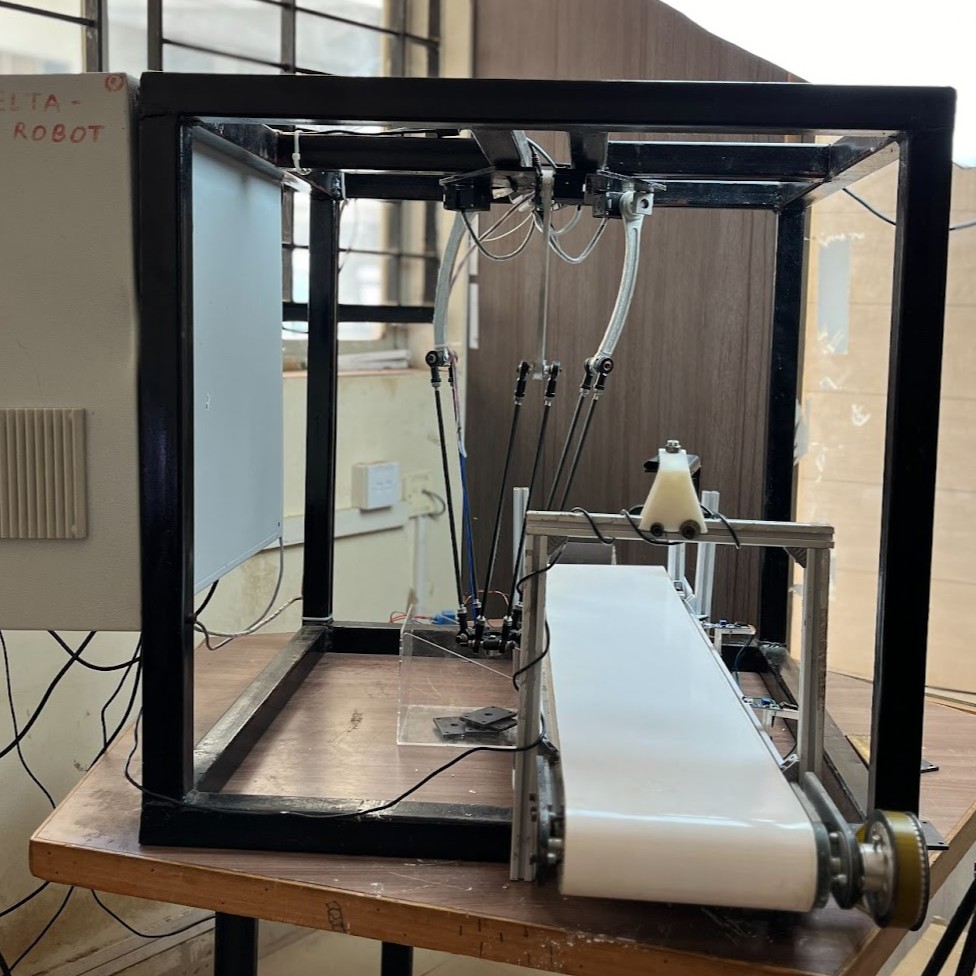
The Quality Control of Products on a Production Line using a 4 DOF Delta Robot was a Senior Design Project - 2023 aimed at building an integrated inspection and sorting system that identifies and removes defective products from a production line using a Delta robot and machine learning.
The system leverages MobileNetV2 CNN for defect detection and a 4 DOF Delta Robot to remove defective products, minimizing human intervention and enhancing productivity. It combines real-time image processing, socket-based robotic control, and automated sorting in a streamlined pipeline.
Technologies Used
Python, OpenCV, TensorFlow/Keras (MobileNetV2), Custom Tkinter GUI, Socket Programming, 4-DOF Delta Kinematics, IR Sensors